Asse Cerniera verticale
Asse Cerniera verticale
Introduzione
Nel capitolo precedente, 'Transverse Hinge Axis', abbiamo introdotto la cinematica mandibolare concentrandoci sul piano sagittale. Abbiamo osservato come, durante i movimenti di protrusione e retrusione, la mandibola non si muova semplicemente lungo l'asse , ma esegua anche una rotazione attorno al centro di rotazione dell'asse . Questo movimento condilare si riflette a livello anteriore, dove l'incisivo mandibolare si sposta con traiettorie curvilinee inverse, risultato di un moto spaziale complesso determinato dalla rototraslazione sugli assi condilari. Lo spazio angolare risultante è di fondamentale importanza per permettere alla mandibola di ruotare liberamente senza ostacoli con escursioni fluide durante il movimento masticatorio. Questo fenomeno è anche conosciuto come 'Spazio libero Interincisivo'.


Questo 'Spazio libero Interincisivo' è cruciale per le funzioni masticatorie. Tuttavia, strumenti come il Sirognatograph e i sistemi elettromagnetici tradizionali tendono a ignorare la componente rotazionale associata ai movimenti condilari, concentrandosi principalmente sulle traslazioni. Sebbene sembri sufficiente per la registrazione del movimento, tale approccio risulta incompleto, data la complessità dei movimenti mandibolari a sei gradi di libertà.
Cinematica Mandibolare a Sei Gradi di Libertà
Il movimento mandibolare avviene in uno spazio tridimensionale e può essere descritto da un complesso moto spaziale. Ogni condilo è associato a tre assi principali:
L'asse (latero-mediale), attorno al quale ruota la mandibola, creando l'asse cerniera trasversale ( transverse Hinge Axis).

L'asse (verticale), con il proprio centro di rotazione sull'asse cerniera verticale ()


L'asse (antero-posteriore), che determina la rotazione attorno all'asse cerniera orizzontale ()

In riferimento agli assi appena definiti, andiamo a introdurre tre piani di riferimento:
Nel contesto del movimento spaziale del condilo, è fondamentale comprendere la relazione tra gli assi di rotazione e i piani di riferimento anatomici.
- Piano sagittale: In questo piano possiamo visualizzare il tracciato condilare risultante dal movimento di rototraslazione dell'asse trasversale ().
- Piano coronale: Associato all'asse orizzontale ().
- Piano assiale: Riferito al movimento generato attorno all'asse verticale (, noto anche come asse cerniera verticale).
Va sottolineato che un piano non è generato da un asse: un asse, al più, può essere contenuto in un piano o rappresentare una direzione lungo la quale si possono descrivere movimenti o proiezioni. Più precisamente, l’inviluppo di un asse in movimento genera una 'superficie rigata', che descrive le traiettorie spaziali associate.
Asse cerniera verticale
Ci concentreremo sull’asse cerniera verticale () per la sua rilevanza nei sistemi di replicazione elegnatografici, pantografica ed assiografica. Tuttavia, prima di procedere, è necessario esaminare il razionale su cui si basa la Gnatologia Classica, per comprendere come i piani e gli assi interagiscono nel descrivere i movimenti condilari.
- Il pantografo analogico è stato considerato come un dispositivo che riproduceva accuratamente i movimenti di confine dei tracciati condilari del paziente e li trasferiva su un articolatore completamente regolabile tramite le sue 6 piastrine. [1][2][3]Successivamente, si è riportato che anche il pantografo elettronico registrava i determinanti condilari con un intervallo accettabile. ( argomento che affronteremo dettagliatamente nei prossimi capitoli)
- Gli investigatori hanno sottolineato l’influenza della corretta registrazione dei movimenti mandibolari sulla morfologia occlusale risultante dei denti posteriori, espressa negli angoli delle cuspidi e nella direzione dei solchi come effetto diretto della variazione dei determinanti condilari.[4][5][6][7][8]
- Un determinante particolare del movimento condilare, la traslazione laterale immediata mandibolare (Movimento di Bennett) dei condili, è stato oggetto di notevole dibattito e confusione nella letteratura protesica.[9][10][11] Tuttavia, una recente revisione sistematica della letteratura ha riportato una mancanza di prove riguardo al significato clinico o alle implicazioni di questo movimento.[12] ( argomento che approceremo in modo più dettagliato in questo capitolo).
Come si può notare il tema si basa sostanzialmente sulla meccanica razionale, argomento non banale, in cui si integrano concetti di geometria, matematica e meccanica ed è auspicabile, quindi, capire il profondo senso concettuale del processo di replicazione dei movimenti mandibolare, per evidenziarne l'eventuale anomalia. Per fare ciò si è inizializzato il percorso analitico prendendo i lavori prestigiosi eseguiti da Lund e Gibbs[13] riguardo la cinematica mandibolare con lo strumento datato ma ancora attuale chiamato, appunto, 'Replicator'.
In questo capitolo, si è focalizzata l'attenzione della cinematica mandibolare sul piano assiale e cioè generata dalla cinematica dell'asse verticale e descriveremo ,perciò, il fenomeno interpretando un tracciato estratto dal lavoro di Lund e Gibs, Figura 1 in cui viene rappresentata la cinematica mandibolare marcati ogni 20 msec. ( vedi figura e popup ![]() Questa figura mostra la rappresentazione dei movimenti masticatori umani con un focus sulla cinematica mandibolare, evidenziando i Punti condilariQuesti punti rappresentano i condili laterotrusivi e mediotrusivi. Il Laterotrusive point (a sinistra) e il Mediotrusive point (a destra) tracciano la posizione dei condili della mandibola durante un movimento masticatorio laterale, che include movimenti complessi di traslazione e rotazione. I punti numerati (1L, 2L, 3L, ecc.) seguono il movimento del condilo laterotrusivo nel tempo, mentre i punti 1M, 2M, ecc. seguono il condilo mediotrusivo e i tracciati dei movimenti su i punti occlusali Punto molareIl Molar point (situato in basso a sinistra) rappresenta il percorso tracciato dal molare durante il movimento masticatorio. Come per i condili, anche qui i punti numerati rappresentano le varie posizioni del molare nel tempo e del Punto incisaleL'Incisal point (in basso a destra) rappresenta il percorso dell'incisivo durante la masticazione. I punti numerati (1, 2, 3, ecc.) descrivono la traiettoria dell'incisivo nel tempo. La figura include un sistema di riferimento tridimensionale con assi cartesiani X, Y, e Z. L'asse Z è orientato verticalmente, l'asse Y rappresenta il movimento laterale (sinistra/destra) della mandibola, e l'asse X indica il movimento antero-posteriore (avanti/indietro).Movimenti masticatori: I tracciati mostrano l'evoluzione dei movimenti durante il ciclo masticatorio, descrivendo la traslazione e rotazione di ciascuna porzione del sistema mandibolare (condili, molari e incisivi) nel tempo.)
Questa figura mostra la rappresentazione dei movimenti masticatori umani con un focus sulla cinematica mandibolare, evidenziando i Punti condilariQuesti punti rappresentano i condili laterotrusivi e mediotrusivi. Il Laterotrusive point (a sinistra) e il Mediotrusive point (a destra) tracciano la posizione dei condili della mandibola durante un movimento masticatorio laterale, che include movimenti complessi di traslazione e rotazione. I punti numerati (1L, 2L, 3L, ecc.) seguono il movimento del condilo laterotrusivo nel tempo, mentre i punti 1M, 2M, ecc. seguono il condilo mediotrusivo e i tracciati dei movimenti su i punti occlusali Punto molareIl Molar point (situato in basso a sinistra) rappresenta il percorso tracciato dal molare durante il movimento masticatorio. Come per i condili, anche qui i punti numerati rappresentano le varie posizioni del molare nel tempo e del Punto incisaleL'Incisal point (in basso a destra) rappresenta il percorso dell'incisivo durante la masticazione. I punti numerati (1, 2, 3, ecc.) descrivono la traiettoria dell'incisivo nel tempo. La figura include un sistema di riferimento tridimensionale con assi cartesiani X, Y, e Z. L'asse Z è orientato verticalmente, l'asse Y rappresenta il movimento laterale (sinistra/destra) della mandibola, e l'asse X indica il movimento antero-posteriore (avanti/indietro).Movimenti masticatori: I tracciati mostrano l'evoluzione dei movimenti durante il ciclo masticatorio, descrivendo la traslazione e rotazione di ciascuna porzione del sistema mandibolare (condili, molari e incisivi) nel tempo.)







Nota sulla Precisione e Sugli Obiettivi dello Studio
Questo studio si propone di fornire una comprensione concettuale dei principi cinematici coinvolti nella dinamica masticatoria, con particolare riferimento alla biomeccanica mandibolare. Sebbene i calcoli presentati siano stati svolti con rigore e utilizzando metodologie matematiche consolidate, potrebbero emergere discrepanze dovute a:
Approssimazioni nei dati numerici: Lieve differenze nei valori cartesiani utilizzati, imputabili a variabili operative o a scelte dell'operatore nell'acquisizione dei dati.
Limiti di rappresentazione: L'utilizzo di numeri approssimati per motivi pratici, soprattutto in calcoli iterativi, potrebbe introdurre variazioni infinitesimali rispetto ai valori teoricamente perfetti.
Finalità del lavoro: Lo scopo principale è descrivere e comprendere il comportamento cinematico del sistema masticatorio, piuttosto che ottenere una precisione assoluta come richiesto in un contesto di ricerca ingegneristica avanzata o in una tesi di dottorato in ingegneria meccanica.
I risultati e le analisi presentate mirano quindi a illustrare concetti e fenomeni in modo chiaro e applicabile, piuttosto che a fornire un riferimento definitivo. L'interpretazione deve essere orientata verso l'obiettivo clinico e didattico del lavoro, senza pretesa di impeccabilità formale sul piano matematico o ingegneristico.
Iniziamo, perciò, con la descrizione dell'analisi cinematica passando per alcuni cruciali step: la rappresentazione dell'immagine su Geogebra, la calibrazione attraverso scalatura delle distanze e la conversione da pixel a millimetri.
, attraverso l'uso dell'immagine riportata, il complesso processo cinematico condilare e dei punti occlusali e per prima cosa bobbiamo necessariamente calibrare la figura e convertirla in pixel.
Descrizione della Calibrazione: da Pixel a Millimetri
La calibrazione di un'immagine per ottenere misurazioni accurate richiede l'attenzione a diversi fattori critici. Estrarre distanze da un'immagine può essere complesso, poiché la precisione dipende da:
- Fattori di distorsione: Le immagini possono essere affette da distorsioni ottiche, che devono essere corrette calibrando la camera utilizzando, ad esempio, una scacchiera di riferimento.
- Effetto prospettico: La scala di riferimento varia con la distanza dal piano di acquisizione. Per oggetti posti a diverse profondità, è necessario applicare fattori di scala specifici, calcolati utilizzando un modello come quello della pin-hole camera.
- Distorsioni prospettiche: Queste possono essere corrette utilizzando ottiche telecentriche, particolarmente utili per applicazioni che richiedono un'elevata accuratezza, come nelle misurazioni spaziali o bioingegneristiche.
Con questa premessa, il fattore di scala utilizzato nel nostro studio rappresenta un'approssimazione valida nel contesto specifico delle immagini 2D acquisite in condizioni controllate. Tuttavia, per applicazioni più rigorose, come quelle descritte sopra, è necessario considerare strumenti e metodi avanzati per la calibrazione.
Calcolo della Distanza tra i Punti
Le coordinate dei punti sono:
e


La formula per la distanza euclidea è:

Sostituendo i valori:



Conversione della Scala in mm
Dato che sappiamo che il segmento di equivale a , calcoliamo la conversione in mm/pixel:



Quindi, ogni pixel nella figura corrisponde a circa:
.

Esempio di Applicazione: Conversione Distanza in mm
Supponiamo di voler calcolare una distanza in mm. Ad esempio, se la distanza in pixel fosse :


Risultato Finale
La scala è:


Questi valori possono essere usati per convertire qualsiasi distanza misurata in pixel nella figura in unità metriche come millimetri o centimetri.
Cinematica dei Condili
Traslazioni e Rotazioni dei Condili
Nel contesto del movimento mandibolare, i condili non eseguono solo movimenti traslatori (spostamenti lineari nello spazio), ma anche rotatori (movimenti angolari attorno a specifici assi). Questo doppio movimento, noto come rototraslazione, è essenziale per comprendere la complessità della cinematica mandibolare.
Per descrivere in modo accurato la posizione e il movimento di ciascun condilo nel tempo, possiamo utilizzare un insieme di vettori di posizione. Questi vettori, che rappresentano i punti nel sistema di riferimento cartesiano, variano in modulo e direzione a seguito del moto elicoidale. Il moto può essere descritto combinando spostamenti lineari e variazioni angolari, che influenzano la posizione dei vettori stessi all'interno dello spazio tridimensionale.
Vettori di Posizione del Condilo Laterotrusivo (Lavorante)
Il condilo laterotrusivo si trova sul lato in cui avviene la laterotrusione, ovvero lo spostamento laterale della mandibola. Durante il movimento, la posizione del condilo può essere descritta mediante un vettore di posizione, definito come il segmento orientato che congiunge il condilo a un’origine del sistema di riferimento cartesiano scelto.Il vettore di posizione varia nel tempo sia in modulo che in direzione, a causa della natura complessa del moto elicoidale. Questo permette di rappresentare il movimento del condilo come una combinazione di spostamenti lineari e cambiamenti di orientamento nel sistema tridimensionale.
Il vettore di posizione del condilo laterotrusivo nel tempo è descritto da:
![{\displaystyle P_{l}(t)=[X_{l}(t),Y_{l}(t),Z_{l}(t),\theta _{l}(t),\phi _{l}(t),\psi _{l}(t)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0460bad60fdbd2bf924fac810d7383a682d79d9e)
Dove:
- : Rappresentano gli spostamenti lineari del condilo laterotrusivo lungo i tre assi dello spazio cartesiano:
- : Spostamento lungo l'asse antero-posteriore (avanti e indietro).
- : Spostamento lungo l'asse latero-mediale (lateralizzazione destra e sinistra).
- : Spostamento lungo l'asse verticale (alto e basso)
- , , : Sono le rotazioni angolari del condilo laterotrusivo attorno ai tre assi del sistema di riferimento cartesiano scelto. Queste rotazioni rappresentano il cambiamento di orientamento del condilo nello spazio, descritto utilizzando la convenzione degli angoli di Eulero. È fondamentale notare che le rotazioni non sono commutative, e quindi l'ordine in cui avvengono le rotazioni deve essere specificato per garantire una descrizione univoca.







Nel nostro caso, adottiamo la convenzione che descrive le rotazioni nel seguente ordine:

- : Rotazione attorno all'asse (causa una torsione laterale della mandibola).

- : Rotazione attorno all'asse (controlla l'apertura e la chiusura della mandibola).

- : Rotazione attorno all'asse (controlla la rotazione laterale/mediale della mandibola).

Questa sequenza di rotazioni consente di determinare in modo univoco l'orientamento del condilo nello spazio, evitando ambiguità derivanti dalla non-commutatività delle rotazioni angolari.

Figura 2: Rappresentazione dei tracciati cinematici masticatori sul piano sagittale
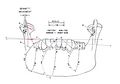
Figura 3: Rappresentazione dei tracciati cinematici masticatori sul piano coronale

Figura 4: Rappresentazione dei tracciati cinematici masticatori sul piano assiale



Ovviamente, la stessa procedura geometrica matematica impiegata per il condilo laterotrusivo sarà utilizzata anche per il condilo mediotrusivo ma noteremo delle caratteristiche essenziali che descrivo il fenomeno laterotrusivo dal mediotrusivo ed i corrispottivi tracciati condizionati sulle aree occlusali.
Questa prima descrizione rappresenta solo il primo livello di complessità perchè i movimenti dei condili laterotrusivo e mediotrusivo si influenzano reciprocamente durante i cicli masticatori. Il condilo laterotrusivo esegue una rototraslazione lungo un arco che descrive una combinazione di rotazione attorno all'asse verticale ed uno spostamento laterale. Al contrario, il condilo mediotrusivo si sposta principalmente medialmente e anteriormente. Descriviamone la dinamica
La rotazione del condilo laterotrusivo attorno all'asse (verticale) è descritta matematicamente utilizzando una trasformazione lineare nel piano trasversale . Questa trasformazione è rappresentata dalla seguente matrice di rotazione:


Dove:
- rappresenta l'angolo di rotazione attorno all'asse (asse verticale).
- sono le coordinate del condilo laterotrusivo nel piano trasversale.


Questo descrive il cambiamento di posizione del condilo laterotrusivo nel piano dovuto alla rotazione angolare.
Il condilo mediotrusivo, invece, si muove principalmente con una traslazione nello spazio tridimensionale, lungo i piani trasversale e sagittale, generando un tragitto noto come "Tragitto orbitante". La traslazione è descritta dal seguente vettore:

Dove:
- rappresentano le coordinate temporali del condilo mediotrusivo nello spazio cartesiano tridimensionale.

Questa traslazione rappresenta il movimento anteriore e mediale del condilo mediotrusivo principalmente lineare ed è per questo che non compare la matrice rotazionale ma potrebbe anche incorporare una rotazione attorno all'asse (asse verticale) influenzando significativamente la dinamica complessiva del ciclo masticatorio. Questo tipo di rotazine aggiuntiva al fenomeno orbitante è difficile da comprendere perchè è di minima entità angolare ma vedremo, in seguito, l'influenza che ha sui tracciati occlusali.
Descrizione delle misure lineari ed angolari
Rappresentazione scalare dei tracciati condilari
Descrizione delle distanze e delle direzioni
Di seguito sono riportate le distanze calcolate tra i punti rispetto al punto di partenza (punto 1, massima intercuspidazione) considerato punto di riferimento e le relative direzioni nello spazio, utilizzando le coordinate corrette per gli assi (antero-posteriore) e (latero-mediale).
Calcolo delle distanze tra i punti
Le coordinate dei punti estrapolate da Geogebra dopo calibrazione, per il condilo laterotrusivo, sono:
1L:

2L:

3L:

4L:

5L:

6L:

7L:

8L:

Fattore di scala:
Distanze rispetto a




















Condilo Laterotrusivo
| Tabella 1 | ||||
|---|---|---|---|---|
| Tracciato masticatorio | Markers | Distanza (mm) | Direzione
|
Direzione |
 |
2 | 1.734 | Protrusiva | Parallela |
| 3 | 4.99 | Protrusiva | Lateralizzazione | |
| 4 | 6.59 | Protrusiva | Lateralizzazione | |
| 5 | 3.66 | Inversione | Inversione | |
| 6 | 0.923 | Retrusiva | Lateralizzazione | |
| 7* | 0.898 | Protrsiva | Medializzazione | |
| 8 | 0.257 | Protrusiva | Medializzazione | |
Osservando la figura e la tabella, possiamo estrapolare le distanze tra i punti marcati ed in particolare segnaliamo che è stato considerato il punto come punto estremo in cui il condilo inverte il moto ed inizia un percorso mediali verso la massima intercuspidazione. Questo punto, anzi, la distanza tra questo punto ed il punto rappresenta il movimento di Bennett. Ad esempio, questa distanza è stata correttamente calcolata come circa con una direzione calcolata come:

ed il corrispettivo


Per chi desidera approfondire il formalismo matematico, riportiamo il calcolo dettagliato nel popup interattivo. ![]() Calcolo dettagliato: distanza tra e , distanza euclidea , convertita in mm come , angolo .
Calcolo dettagliato: distanza tra e , distanza euclidea , convertita in mm come , angolo .





46laterotrusivo Molare Laterotrusivo
Il testo descrive un'analisi dettagliata dei movimenti articolari del molare ipsilaterale al condilo laterotrusivo (Figura 6 e Tabella 2). L'analisi si basa sul calcolo delle distanze tra punti e degli angoli formati tra i vettori utilizzando la trigonometria vettoriale.
| Tabella 2 | ||||
|---|---|---|---|---|
| Tracciato masticatorio | Markers | Distanza
(mm) |
Direzione
|
Direzione dinamica
|
 |
2 | 0.39 | Indietro | Lateralizzazione |
| 3 | 2.18 | Indietro | Lateralizzazione | |
| 4 | 3.57 | Indietro | Lateralizzazione | |
| 5 | 5.68 | Indietro | Lateralizzazione | |
| 6 | 6.76 | Indietro | Inversione | |
| 7* | 3.93 | Indietro | Medializzazione | |
| 8 | 1.15 | Indietro | Medializzazione | |
Osservando la figura e la tabella, possiamo estrapolare le distanze e le direzioni dei punti marcati. Nello specifico, la distanza del punto rispetto al punto iniziale è stata calcolata come circa , con un angolo formato tra i vettori pari a . ![]() Definizione dei vettori:, . Magnitudine di : , magnitudine di : . Prodotto scalare: , , angolo:
Definizione dei vettori:, . Magnitudine di : , magnitudine di : . Prodotto scalare: , , angolo:













Incisal
Il paragrafo descrive un'analisi matematica dei movimenti articolari dell'incisivo sul lato lavorante. Utilizzando le coordinate di tre punti nello spazio 2D , e , vengono calcolate le distanze lineari tra i punti, oltre all'angolo tra i segmenti che collegano questi punti.



| Tabella 3 | ||||
|---|---|---|---|---|
| Tracciato masticatorio | Markers | Distanza (mm) | Direzione
|
Direzione dinamica
|
 |
2 | 0.69 | Retrusiva | Lateralizzazione |
| 3 | 2.30 | Retrusiva | Lateralizzazione | |
| 4 | 4.61 | Retrusiva | Lateralizzazione | |
| 5 | 7.58 | Protrusivo | Lateralizzazione | |
| 6 | 8.54 | Retrusiva | Inversione | |
| 7* | 5.12 | Retrusiva | Medializzazione | |
| 8 | 1.75 | Retrusiva | Medializzazione | |
Per quanto riguarda i tracciati nell'area dell'incisivo tra il punto e , la distanza risulta essere di con un angolo approssimativamente pari a . Per approfondimenti di calcolo, vedi la spiegazione dettagliata qui
![]() Coordinate dei punti: , , . Vettori: , . Norme: , . Prodotto scalare: . Coseno: . Angolo: .
Coordinate dei punti: , , . Vettori: , . Norme: , . Prodotto scalare: . Coseno: . Angolo: .














Molare mediotrusivo




| Tabella 4 | ||||
|---|---|---|---|---|
| Tracciato mediotrusivo molare | Markers | Distanza (mm) | Direzione
|
Direzione dinamica
|
 |
2 | 0.68 | Retrusiva | Medializzazione |
| 3 | 2.19 | Retrusiva | Medializzazione | |
| 4 | 3.22 | Retrusiva | Medializzazione | |
| 5 | 5.79 | Protrusiva | Medializzazione | |
| 6 | 7.22 | Protrusiva | Inversione | |
| 7* | 4.81 | Retrusiva | Lateralizzazione | |
| 8 | 1.18 | Retrusiva | Lateralizzazione | |
Come per i precedenti, la distanza lineare tra il punto ed il punto è risultata essere mentre l'angolo è stato calcolato come: Per approfondire la procedura matematica, vedi la spiegazione dettagliata qui ![]() Definizione vettori ,. Prodotto scalare: . Norme:, . Coseno: . Angolo: .
Definizione vettori ,. Prodotto scalare: . Norme:, . Coseno: . Angolo: .










Condilo Mediotrusivo
Questi punti rappresentano posizioni specifiche all'interno di un sistema articolare che stiamo studiando, con l'obiettivo di calcolare l'angolo tra il segmento che unisce i punti e , e il segmento che unisce i punti e . Questo tipo di analisi è comune nella modellazione di movimenti articolari per comprendere come si muovono i segmenti di un sistema rispetto a un punto di riferimento, come nel caso di un sistema masticatorio.


| Tabella 5 | ||||
|---|---|---|---|---|
| Tracciato masticatorio | Markers | Distanza
(mm) |
Direzione
|
Direzione
|
 |
2 | 2.13 | Protrusiva | Medializzazione |
| 3 | 6.19 | Protrusiva | Medializzazione | |
| 4 | 10.70 | Protrusiva | Medializzazione | |
| 5 | 11.09 | Protrusiva | Inversione | |
| 6 | 6.09 | Protrusiva | Lateralizzazione | |
| 7* | 2.61 | Protrusiva | Lateralizzazione | |
| 8 | 0.50 | Protrusiva | Lateralizzazione | |
Per quanto riguarda le distanze e la direzione del punto 7 nel condilo mediotrusivo, abbiamo una distanza dal punto di partenza di mm ed un angolo calcolato sull'arcoseno . Infine, sottraendo questo angolo da 180°, otteniamo un angolo di , noto come Angolo di Bennett. Per approfondire la procedura matematica, vedi ![]() Calcolo sintetico: vettore , vettore, prodotto scalare , norme , , , .
Calcolo sintetico: vettore , vettore, prodotto scalare , norme , , , .









Discussione sulla rototraslazione condilari
Il moto rototraslazionale dei condili è fondamentale per comprendere la cinematica mandibolare e i tracciati descritti dai denti durante la masticazione. Se i condili ruotassero semplicemente attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero archi di cerchio con un unico centro. Tuttavia, i movimenti reali dei condili sono molto più complessi.
Durante la laterotrusione, il condilo ipsilaterale (dello stesso lato) esegue un movimento che combina rotazione attorno all'asse verticale e traslazione laterale. Allo stesso tempo, il condilo controlaterale si muove principalmente in direzione mediale e anteriore, descrivendo un percorso noto come "Tragitto orbitante".
Descrizione matematica
Matematicamente, possiamo descrivere il moto rototraslazionale del condilo laterotrusivo come una combinazione di una rotazione attorno all'asse verticale passante per il condilo stesso e una traslazione laterale lungo una traiettoria specifica. La posizione del molare ipsilaterale in un determinato istante può essere ottenuta applicando la rotazione attorno all'asse verticale e poi la traslazione corrispondente:


Dove:
- è la posizione iniziale del molare ipsilaterale.
- rappresenta la traslazione laterale lungo l'asse .
- rappresenta la posizione finale del molare ipsilaterale.



Man mano che il condilo ruota e si sposta lateralmente, le coordinate del molare descrivono una traiettoria ellittica proiettata su un piano bidimensionale. Questo fenomeno ellittico si verifica perché il centro di rotazione istantaneo del condilo laterotrusivo non è fisso, ma si sposta continuamente a causa della traslazione laterale. Pertanto, il tracciato descritto dal molare ipsilaterale non può essere un semplice arco di cerchio, ma assume una forma ellittica.
Un comportamento simile si osserva anche per il condilo controlaterale (mediotrusivo) e per gli incisivi. Sebbene il movimento del condilo mediotrusivo sia principalmente una traslazione mediale e anteriore, può essere coinvolta anche una certa rotazione attorno all'asse verticale. Questa combinazione di traslazione e rotazione porta nuovamente a tracciati ellittici per il molare controlaterale e per gli incisivi.
È importante sottolineare che i tracciati ellittici osservati non sono ellissi perfette, ma curve più complesse, poiché i movimenti dei condili non sono semplici rotazioni e traslazioni costanti. Infatti, i condili seguono traiettorie più elaborate, con accelerazioni e decelerazioni, che si riflettono nella forma dei tracciati dei denti.
Inoltre, i tracciati dei molari e degli incisivi non sono indipendenti, ma sono strettamente correlati ai movimenti dei condili corrispondenti. Pertanto, l'analisi dei tracciati dei denti può fornire informazioni preziose sulla cinematica mandibolare e sui movimenti articolari dei condili.

In conclusione, la combinazione di rotazione e traslazione dei condili durante i movimenti mandibolari impedisce ai tracciati dei molari e degli incisivi di essere semplici archi di cerchio. Invece, questi tracciati assumono forme ellittiche, poiché il centro di rotazione istantaneo dei condili si sposta continuamente a causa del moto rototraslazionale complesso. Per comprendere meglio la complessità delle traiettorie, è stato costruito un modello matematico basato su una conica passante per cinque punti strategicamente scelti, come illustrato nella figura 10a e approfondito nel prossimo paragrafo.
qui
- ↑ Curtis, D.A. ∙ Sorensen, J.A. Errors incurred in programming a fully adjustable articulator with a pantograph J Prosthet Dent. 1986; 55:427-429
- ↑ Clayton, J.A. ∙ Kotowicz, W.E. ∙ Zahler, J.M. Pantographic tracings of mandibular movements and occlusion J Prosthet Dent. 1971; 75:389-395
- ↑ Shields, J.M. ∙ Clayton, J.A. ∙ Sindledecker, L.D. Using pantographic tracings to detect TMJ and muscle dysfunctions J Prosthet Dent. 1978; 39:80-87
- ↑ Payne, J. Condylar determinants in a patient population: electronic pantograph assessment J Oral Rehabil. 1997; 24:157-163
- ↑ Chang, W.S.W. ∙ Romberg, E. ∙ Driscoll, C.F. ... An in vitro evaluation of the reliability and validity of an electronic pantograph by testing with five different articulators J Prosthet Dent. 2004; 92:83-89
- ↑ Price, R.B. ∙ Bannerman, R.A. A comparison of articulator settings obtained by using an electronic pantograph and lateral interocclusal recordings J Prosthet Dent. 1988; 60:159-164
- ↑ Celar, A.G. ∙ Tamaki, K. Accuracy of recording horizontal condylar inclination and Bennett angle with the Cadiax compact J Oral Rehabil. 2002; 29:1076-1081
- ↑ Bernhardt, O. ∙ Kuppers, N. ∙ Rosin, M. ... Comparative tests of arbitrary and kinematic transverse horizontal axis recordings of mandibular movements J Prosthet Dent. 2003; 89:175-179
- ↑ Bennett, N.G. A contribution to the study of the movements of the mandible Proc R Soc Med. 1908; 1:79-98
- ↑ Lundeen, H.C. ∙ Shryock, E.F. ∙ Gibbs, C.H. An evaluation of mandibular border movements: Their character and significance J Prosthet Dent. 1978; 40:442-452
- ↑ Hobo, S. Formula for adjusting the horizontal condylar path of the semiadjustable articulator with interocclusal records. Part I: Correlation between the immediate side shift, the progressive side shift, and the Bennet angle J Prosthet Dent. 1986; 55:422-426
- ↑ Taylor, T.D. ∙ Bidra, A.S. ∙ Nazarova, E. ... Clinical significance of immediate mandibular lateral translation: A systematic review J Prosthet Dent. 2016; 115:412-418
- ↑ N A Wickwire, C H Gibbs, A P Jacobson, H C Lundeen. Chewing patterns in normal children. Angle Orthod. 1981 Jan;51(1):48-60. doi: 10.1043/0003-3219(1981)051<0048:CPINC>2.0.CO;2. PMID: 6971588