|
|
| (19 intermediate revisions by the same user not shown) |
| Line 1: |
Line 1: |
| ===Condilo Mediotrusivo===
| | <P>'''Condilo Mediotrusivo'''</P> |
|
| |
|
| Questi punti rappresentano tre posizioni specifiche all'interno di un sistema articolare che stiamo studiando, con l'obiettivo di calcolare l'angolo tra il segmento che unisce i punti <math>P1_{M}</math> e <math>P7_{M}</math>, e il segmento che unisce i punti <math>P1_{M}</math> e <math>R_p</math>. Questo tipo di analisi è comune nella modellazione di movimenti articolari per comprendere come si muovono i segmenti di un sistema rispetto a un punto di riferimento, come nel caso di un sistema masticatorio. | | Questi punti rappresentano posizioni specifiche all'interno di un sistema articolare che stiamo studiando, con l'obiettivo di calcolare l'angolo tra il segmento che unisce i punti <math>1M_c</math> e <math>/M_c</math>, e il segmento che unisce i punti <math>1M_c</math> e <math>R_pc</math>. Questo tipo di analisi è comune nella modellazione di movimenti articolari per comprendere come si muovono i segmenti di un sistema rispetto a un punto di riferimento, come nel caso di un sistema masticatorio. |
| | |
| | |
| | |
| ----
| |
| ===Condilo Mediotrusivo===
| |
| | |
| Questi punti rappresentano tre posizioni specifiche all'interno di un sistema articolare che stiamo studiando, con l'obiettivo di calcolare l'angolo tra il segmento che unisce i punti <math>P1_{M}</math> e <math>P7_{M}</math>, e il segmento che unisce i punti <math>P1_{M}</math> e <math>R_p</math>. Questo tipo di analisi è comune nella modellazione di movimenti articolari per comprendere come si muovono i segmenti di un sistema rispetto a un punto di riferimento, come nel caso di un sistema masticatorio.
| |
|
| |
|
| <Center> | | <Center> |
| {| | | {| class="wikitable" |
| ! colspan="5" |Tabella 5 | | ! colspan="5" |Tabella 5 |
| |- | | |- |
| !Tracciato masticatorio | | !Tracciato masticatorio |
| !Markers!!Distanza (mm)!!Direzione in X (antero-posteriore)!!Direzione (Y-latero-mediale) | | !Markers |
| | !Distanza |
| | (mm) |
| | !Direzione |
| | <math>X</math> |
| | !Direzione |
| | <math>Y</math> |
| |- | | |- |
| | rowspan="8" |[[File:Figura condilo mediotrusivo mod..jpg|center|408x408px]]'''Figura 5:''' | | | rowspan="8" |[[File:Figura 5. finale.jpg|center|400x400px]]'''Figura 9:''' <small>Rappresentazione grafica dei markers rilevati dal 'Replicator'</small><small>nella masticazione sul lato destro del paziente nell'area inccisale.</small> |
| |2||5.09||Protrusiva||Medializzazione | | |2||2.13||Protrusiva||Medializzazione |
| |- | | |- |
| |3||14.81||Protrusiva||Medializzazione | | |3||6.19||Protrusiva||Medializzazione |
| |- | | |- |
| |4||25.58||Protrusiva||Medializzazione | | |4||10.70||Protrusiva||Medializzazione |
| |- | | |- |
| |5||26.54||Protrusiva||Inversione | | |5||11.09||Protrusiva||Inversione |
| |- | | |- |
| |6||14.57||Protrusiva||Lateralizzazione | | |6||6.09||Protrusiva||Lateralizzazione |
| |- | | |- |
| |7*||6.25||Protrusiva||Lateralizzazione | | |7*||2.61||Protrusiva||Lateralizzazione |
| |- | | |- |
| |8||1.19||Protrusiva||Lateralizzazione | | |8||0.50||Protrusiva||Lateralizzazione |
| |- | | |- |
| | colspan="4" | | | | colspan="4" | |
| Line 36: |
Line 35: |
| </Center> | | </Center> |
|
| |
|
| Per quanto riguarda le distanze e la direzione del punto 7 nel condilo mediotrusivo abbiamo una distanza dal punto di partenza di 6.25 mm ed un angolo calcolato sull'arcoseno <math>\theta = \arccos(-0.971) \approx 166^\circ</math>. Infine, sottraendo questo angolo da 180°, otteniamo un angolo di <math>13.57^\circ</math>, noto come '''Angolo di Bennett'''. Per approfondire la procedura matematica vedi {{Tooltip|2=L'angolo tra due segmenti può essere calcolato utilizzando la trigonometria vettoriale. Innanzitutto, dobbiamo calcolare i vettori che rappresentano i segmenti tra i punti: il vettore tra il punto <math>P1_{M}</math> e il punto <math>P7_{M}</math>: <math>\vec{AB} = P7_{M}-P1_{M}=(522.5, -87)-(530.6, -61.8)=(-8.1, -25.2)</math>. Il vettore tra il punto <math>P1_{M}</math> e il punto di riferimento <math>R_p</math>: <math>\vec{AC}=R_p-P1_{M}=(530.8, -9.3)-(530.6, -61.8)=(0.2, 52.5)</math>. Il prodotto scalare tra i vettori <math>\vec{AB}</math> e <math>\vec{AC}</math> è dato dalla formula: <math>\vec{AB} \cdot \vec{AC} = AB_x \cdot AC_x + AB_y \cdot AC_y</math>. Sostituendo i valori calcolati: <math>\vec{AB} \cdot \vec{AC} = (-8.1) \cdot (0.2) + (-25.2) \cdot (52.5) = -1.62 - 1323.0 = -1324.62</math>. Le norme dei vettori sono: <math>|\vec{AB}| = \sqrt{(-8.1)^2 + (-25.2)^2} = \sqrt{65.61 + 635.04} = \sqrt{700.65} \approx 26.47</math> e <math>|\vec{AC}| = \sqrt{(0.2)^2 + (52.5)^2} = \sqrt{0.04 + 2756.25} = \sqrt{2756.29} \approx 52.50</math>. Ora possiamo usare la formula per il coseno dell'angolo tra i due vettori: <math>\cos(\theta) = \frac{\vec{AB} \cdot \vec{AC}}{|\vec{AB}| \cdot |\vec{AC}|}</math>. Sostituendo i valori: <math>\cos(\theta) = \frac{-1324.62}{26.47 \cdot 52.50} = \frac{-1324.62}{1388.68} \approx -0.971</math>. L'angolo <math>\theta</math> è calcolato tramite la funzione arccoseno: <math>\theta = \arccos(-0.971) \approx 166.43^\circ</math>. Infine, sottraendo questo angolo da 180°, otteniamo un angolo di <math>13.57^\circ</math>, noto come '''Angolo di Bennett'''.}}
| |
| ==Conclusioni del paragrafo==
| |
|
| |
|
| Il moto rototraslazionale dei condili è fondamentale per comprendere la cinematica mandibolare e i tracciati descritti dai denti durante la masticazione. Se i condili ruotassero semplicemente attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero archi di cerchio con un unico centro. Tuttavia, i movimenti reali dei condili sono molto più complessi.
| | Per quanto riguarda le distanze e la direzione del punto 7 nel condilo mediotrusivo, abbiamo una distanza dal punto di partenza di <math>6.88</math>mm ed un angolo calcolato sull'arcoseno <math>\theta = \arccos(-0.971) \approx 166^\circ</math>. Infine, sottraendo questo angolo da 180°, otteniamo un angolo di <math>14^\circ</math>, noto come '''Angolo di Bennett'''. Per approfondire la procedura matematica, vedi {{Tooltip|2=Calcolo sintetico: vettore <math>\vec{AB} = (-15.9, -60.4)</math>, vettore<math>\vec{AC} = (0.2, 52.5)</math>, prodotto scalare <math>\vec{AB} \cdot \vec{AC} = -3172.62</math>, norme <math>|\vec{AB}| = 62.93</math>, <math>|\vec{AC}| = 52.50</math>, <math>\cos(\theta) = \frac{-3172.62}{62.93 \cdot 52.50} \approx-0.971</math>, <math>\theta =\arccos(-0.971) \approx 166^\circ</math>.}} |
|
| |
|
| Durante la laterotrusione, il condilo ipsilaterale (dello stesso lato) esegue un movimento che combina rotazione attorno all'asse verticale e traslazione laterale. Allo stesso tempo, il condilo controlaterale si muove principalmente in direzione mediale e anteriore, descrivendo un percorso noto come "tragitto orbitante".
| | ---- |
|
| |
|
| Matematicamente, possiamo descrivere il moto rototraslazionale del condilo laterotrusivo come una combinazione di una rotazione attorno all'asse verticale passante per il condilo stesso e una traslazione laterale lungo una traiettoria specifica. La posizione del molare ipsilaterale in un determinato istante può essere ottenuta applicando la rotazione attorno all'asse verticale e poi la traslazione corrispondente.
| | ===Discussione sulla rototraslazione condilari=== |
|
| |
|
| Supponiamo che il condilo laterotrusivo ruoti di un angolo <math>\theta</math> attorno all'asse verticale e si sposti lateralmente di una quantità <math>T_x</math>. La posizione del molare ipsilaterale dopo questo movimento sarà data da:
| | Il moto rototraslazionale dei condili è fondamentale per comprendere la cinematica mandibolare e i tracciati descritti dai denti durante la masticazione. Se i condili ruotassero semplicemente attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero archi di cerchio con un unico centro. Tuttavia, i movimenti reali dei condili sono molto più complessi. |
|
| |
|
| <math>
| | Durante la laterotrusione, il condilo ipsilaterale (dello stesso lato) esegue un movimento che combina rotazione attorno all'asse verticale e traslazione laterale. Allo stesso tempo, il condilo controlaterale si muove principalmente in direzione mediale e anteriore, descrivendo un percorso noto come "Tragitto orbitante". |
| x_m = x_{m0} \cos(\theta) - y_{m0} \sin(\theta) + T_x
| |
| y_m = x_{m0} \sin(\theta) + y_{m0} \cos(\theta)
| |
| </math>
| |
|
| |
|
| Dove <math>(x_{m0}, y_{m0}) </math> è la posizione iniziale del molare ipsilaterale. Man mano che il condilo ruota e si sposta lateralmente, le coordinate <math>(x_m, y_m)</math> del molare descriveranno una traiettoria ellittica invece che circolare.
| | '''Descrizione matematica''' |
|
| |
|
| Questo fenomeno si verifica perché il centro di rotazione istantaneo del condilo laterotrusivo non è fisso, ma si sposta continuamente a causa della traslazione laterale. Pertanto, il tracciato descritto dal molare ipsilaterale non può essere un semplice arco di cerchio, ma assume una forma ellittica.
| | Matematicamente, possiamo descrivere il moto rototraslazionale del condilo laterotrusivo come una combinazione di una rotazione attorno all'asse verticale passante per il condilo stesso e una traslazione laterale lungo una traiettoria specifica. La posizione del molare ipsilaterale in un determinato istante può essere ottenuta applicando la rotazione attorno all'asse verticale e poi la traslazione corrispondente: |
| | |
| Un comportamento simile si osserva anche per il condilo controlaterale (mediotrusivo) e per gli incisivi. Sebbene il movimento del condilo mediotrusivo sia principalmente una traslazione mediale e anteriore, può essere coinvolta anche una '''certa rotazione attorno all'asse verticale'''. Questa combinazione di traslazione e rotazione porta nuovamente a tracciati ellittici per il molare controlaterale e per gli incisivi.
| |
| | |
| È importante sottolineare che i tracciati ellittici osservati non sono ellissi perfette, ma curve più complesse, poiché i movimenti dei condili non sono semplici rotazioni e traslazioni costanti. Infatti, i condili seguono traiettorie più elaborate, con accelerazioni e decelerazioni, che si riflettono nella forma dei tracciati dei denti.
| |
| | |
| Inoltre, i tracciati dei molari e degli incisivi non sono indipendenti, ma sono strettamente correlati ai movimenti dei condili corrispondenti. Pertanto, l'analisi dei tracciati dei denti può fornire informazioni preziose sulla cinematica mandibolare e sui movimenti articolari dei condili.
| |
| | |
| In conclusione, la combinazione di rotazione e traslazione dei condili durante i movimenti mandibolari impedisce ai tracciati dei molari e degli incisivi di essere semplici archi di cerchio. Invece, questi tracciati assumono forme ellittiche, poiché il centro di rotazione istantaneo dei condili si sposta continuamente a causa del moto rototraslazionale complesso. Per rendere più esaustivo il concetto si è generata una conica passante per 5 punti presi in modo strategico nella figura 1, come approfondiremo nel prossimo paragrafo.
| |
| | |
| | |
| ==Rappresentazione cinematica attraverso una conica==
| |
| | |
| | |
| Per rappresentare in modo più dettagliato e formale la forma ellittica dei tracciati dei denti dovuti al moto rototraslazionale dei condili, possiamo sovrapporre una conica (ellisse) a più punti. Questo ci permetterà di evidenziare il contributo dei movimenti dei condili laterotrusivo e mediotrusivo, nonché delle distanze occlusali da essi, nella generazione di tali tracciati pseudoellittici.
| |
| | |
| Consideriamo ad esempio il tracciato del molare ipsilaterale durante la laterotrusione. Supponiamo di avere le coordinate di 5 punti distinti su questo tracciato: <math>(x_1, y_1), (x_2, y_2), (x_3, y_3), (x_4, y_4), (x_5, y_5)</math>.
| |
| | |
| L'equazione generale di un'ellisse centrata nell'origine è data da:
| |
|
| |
|
| <math> | | <math> |
| \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1
| | x_m = x_{m0} \cos(\theta) - y_{m0} \sin(\theta) + T_x |
| </math> | | </math> |
|
| |
| Dove <math>a</math> e <math>b</math> sono rispettivamente i semiassi maggiore e minore dell'ellisse.
| |
|
| |
| Per determinare i valori di <math>a</math> e <math>b</math> che meglio approssimano i 5 punti dati, possiamo utilizzare il metodo dei minimi quadrati. L'obiettivo è minimizzare la somma dei quadrati delle distanze dei punti dall'ellisse.
| |
|
| |
| Definiamo la funzione di costo:
| |
|
| |
|
| <math> | | <math> |
| J(a, b) = \sum_{i=1}^5 \left[ \left( \frac{x_i^2}{a^2} + \frac{y_i^2}{b^2} - 1 \right)^2 \right]
| | y_m = x_{m0} \sin(\theta) + y_{m0} \cos(\theta) |
| </math> | | </math> |
|
| |
|
| Minimizzando <math>J(a, b)</math> rispetto a <math>a</math> e <math>b</math>, otteniamo le stime ottimali dei semiassi <math>a</math> e <math>b</math> che approssimano al meglio i punti dati.
| | Dove: |
| | *<math>(x_{m0}, y_{m0})</math> è la posizione iniziale del molare ipsilaterale. |
| | *<math>T_x</math> rappresenta la traslazione laterale lungo l'asse <math>x</math>. |
| | *<math>(x_m, y_m)</math> rappresenta la posizione finale del molare ipsilaterale. |
|
| |
|
| Questa ellisse ottimizzata rappresenterà il tracciato pseudoellittico del molare ipsilaterale, influenzato dai movimenti rototraslazionali dei condili laterotrusivo e mediotrusivo, nonché dalle distanze occlusali da essi.
| | Man mano che il condilo ruota e si sposta lateralmente, le coordinate <math>(x_m, y_m)</math> del molare descrivono una traiettoria ellittica proiettata su un piano bidimensionale. Questo fenomeno ellittico si verifica perché il centro di rotazione istantaneo del condilo laterotrusivo non è fisso, ma si sposta continuamente a causa della traslazione laterale. Pertanto, il tracciato descritto dal molare ipsilaterale non può essere un semplice arco di cerchio, ma assume una forma ellittica. |
|
| |
|
| I semiassi <math>a</math> e <math>b</math> dell'ellisse saranno determinati dai pesi relativi dei contributi dei condili e delle distanze occlusali. Ad esempio, un valore di <math>a</math> maggiore potrebbe indicare un'influenza più significativa del condilo laterotrusivo, mentre un valore di <math>b</math> più piccolo potrebbe suggerire un'influenza minore del condilo mediotrusivo o delle distanze occlusali.
| | Un comportamento simile si osserva anche per il condilo controlaterale (mediotrusivo) e per gli incisivi. Sebbene il movimento del condilo mediotrusivo sia principalmente una traslazione mediale e anteriore, può essere coinvolta anche una certa '''rotazione attorno all'asse verticale'''. Questa combinazione di traslazione e rotazione porta nuovamente a tracciati ellittici per il molare controlaterale e per gli incisivi. |
|
| |
|
| Questo approccio può essere applicato anche ai tracciati degli incisivi e dei molari controlaterali, sovrapponendo ellissi ottimizzate ai rispettivi punti per ottenere una rappresentazione formale dei loro tracciati pseudoellittici.
| | È importante sottolineare che i tracciati ellittici osservati non sono ellissi perfette, ma curve più complesse, poiché i movimenti dei condili non sono semplici rotazioni e traslazioni costanti. Infatti, i condili seguono traiettorie più elaborate, con accelerazioni e decelerazioni, che si riflettono nella forma dei tracciati dei denti. |
|
| |
|
| In questo modo, l'analisi matematica dei tracciati dei denti durante la masticazione può essere arricchita con una rappresentazione visiva più dettagliata e quantitativa, permettendo di studiare in modo più approfondito il contributo dei diversi fattori cinematici, come i movimenti dei condili e le distanze occlusali, nella generazione di tali tracciati complessi.
| | Inoltre, i tracciati dei molari e degli incisivi non sono indipendenti, ma sono strettamente correlati ai movimenti dei condili corrispondenti. Pertanto, l'analisi dei tracciati dei denti può fornire informazioni preziose sulla cinematica mandibolare e sui movimenti articolari dei condili.[[File:Conica.jpg|300x300px|'''Figura 10a:''' <small>Rappresentazione generica di conica, segue descrizione dettagliata.</small>|thumb]]In conclusione, la combinazione di rotazione e traslazione dei condili durante i movimenti mandibolari impedisce ai tracciati dei molari e degli incisivi di essere semplici archi di cerchio. Invece, questi tracciati assumono forme ellittiche, poiché il centro di rotazione istantaneo dei condili si sposta continuamente a causa del moto rototraslazionale complesso. Per comprendere meglio la complessità delle traiettorie, è stato costruito un modello matematico basato su una conica passante per cinque punti strategicamente scelti, come illustrato nella figura 10a e approfondito nel prossimo paragrafo. |
Condilo Mediotrusivo
Questi punti rappresentano posizioni specifiche all'interno di un sistema articolare che stiamo studiando, con l'obiettivo di calcolare l'angolo tra il segmento che unisce i punti  e
e  , e il segmento che unisce i punti e
, e il segmento che unisce i punti e  . Questo tipo di analisi è comune nella modellazione di movimenti articolari per comprendere come si muovono i segmenti di un sistema rispetto a un punto di riferimento, come nel caso di un sistema masticatorio.
. Questo tipo di analisi è comune nella modellazione di movimenti articolari per comprendere come si muovono i segmenti di un sistema rispetto a un punto di riferimento, come nel caso di un sistema masticatorio.
| Tabella 5
|
| Tracciato masticatorio
|
Markers
|
Distanza
(mm)
|
Direzione

|
Direzione

|
| Figura 9: Rappresentazione grafica dei markers rilevati dal 'Replicator'nella masticazione sul lato destro del paziente nell'area inccisale.
|
2 |
2.13 |
Protrusiva |
Medializzazione
|
| 3 |
6.19 |
Protrusiva |
Medializzazione
|
| 4 |
10.70 |
Protrusiva |
Medializzazione
|
| 5 |
11.09 |
Protrusiva |
Inversione
|
| 6 |
6.09 |
Protrusiva |
Lateralizzazione
|
| 7* |
2.61 |
Protrusiva |
Lateralizzazione
|
| 8 |
0.50 |
Protrusiva |
Lateralizzazione
|
|
|
Per quanto riguarda le distanze e la direzione del punto 7 nel condilo mediotrusivo, abbiamo una distanza dal punto di partenza di  mm ed un angolo calcolato sull'arcoseno
mm ed un angolo calcolato sull'arcoseno  . Infine, sottraendo questo angolo da 180°, otteniamo un angolo di
. Infine, sottraendo questo angolo da 180°, otteniamo un angolo di  , noto come Angolo di Bennett. Per approfondire la procedura matematica, vedi
, noto come Angolo di Bennett. Per approfondire la procedura matematica, vedi  Calcolo sintetico: vettore
Calcolo sintetico: vettore  , vettore
, vettore , prodotto scalare
, prodotto scalare  , norme
, norme  ,
,  ,
,  , .
, .
Discussione sulla rototraslazione condilari
Il moto rototraslazionale dei condili è fondamentale per comprendere la cinematica mandibolare e i tracciati descritti dai denti durante la masticazione. Se i condili ruotassero semplicemente attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero archi di cerchio con un unico centro. Tuttavia, i movimenti reali dei condili sono molto più complessi.
Durante la laterotrusione, il condilo ipsilaterale (dello stesso lato) esegue un movimento che combina rotazione attorno all'asse verticale e traslazione laterale. Allo stesso tempo, il condilo controlaterale si muove principalmente in direzione mediale e anteriore, descrivendo un percorso noto come "Tragitto orbitante".
Descrizione matematica
Matematicamente, possiamo descrivere il moto rototraslazionale del condilo laterotrusivo come una combinazione di una rotazione attorno all'asse verticale passante per il condilo stesso e una traslazione laterale lungo una traiettoria specifica. La posizione del molare ipsilaterale in un determinato istante può essere ottenuta applicando la rotazione attorno all'asse verticale e poi la traslazione corrispondente:


Dove:
 è la posizione iniziale del molare ipsilaterale.
è la posizione iniziale del molare ipsilaterale. rappresenta la traslazione laterale lungo l'asse
rappresenta la traslazione laterale lungo l'asse  .
. rappresenta la posizione finale del molare ipsilaterale.
rappresenta la posizione finale del molare ipsilaterale.
Man mano che il condilo ruota e si sposta lateralmente, le coordinate del molare descrivono una traiettoria ellittica proiettata su un piano bidimensionale. Questo fenomeno ellittico si verifica perché il centro di rotazione istantaneo del condilo laterotrusivo non è fisso, ma si sposta continuamente a causa della traslazione laterale. Pertanto, il tracciato descritto dal molare ipsilaterale non può essere un semplice arco di cerchio, ma assume una forma ellittica.
Un comportamento simile si osserva anche per il condilo controlaterale (mediotrusivo) e per gli incisivi. Sebbene il movimento del condilo mediotrusivo sia principalmente una traslazione mediale e anteriore, può essere coinvolta anche una certa rotazione attorno all'asse verticale. Questa combinazione di traslazione e rotazione porta nuovamente a tracciati ellittici per il molare controlaterale e per gli incisivi.
È importante sottolineare che i tracciati ellittici osservati non sono ellissi perfette, ma curve più complesse, poiché i movimenti dei condili non sono semplici rotazioni e traslazioni costanti. Infatti, i condili seguono traiettorie più elaborate, con accelerazioni e decelerazioni, che si riflettono nella forma dei tracciati dei denti.
Inoltre, i tracciati dei molari e degli incisivi non sono indipendenti, ma sono strettamente correlati ai movimenti dei condili corrispondenti. Pertanto, l'analisi dei tracciati dei denti può fornire informazioni preziose sulla cinematica mandibolare e sui movimenti articolari dei condili.
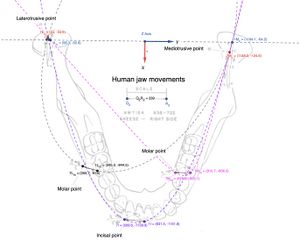
Figura 10a: Rappresentazione generica di conica, segue descrizione dettagliata. In conclusione, la combinazione di rotazione e traslazione dei condili durante i movimenti mandibolari impedisce ai tracciati dei molari e degli incisivi di essere semplici archi di cerchio. Invece, questi tracciati assumono forme ellittiche, poiché il centro di rotazione istantaneo dei condili si sposta continuamente a causa del moto rototraslazionale complesso. Per comprendere meglio la complessità delle traiettorie, è stato costruito un modello matematico basato su una conica passante per cinque punti strategicamente scelti, come illustrato nella figura 10a e approfondito nel prossimo paragrafo.

