Store:Asse Cerniera verticale parte 1
Introduzione
Nel capitolo precedente, 'Transverse Hinge Axis', abbiamo introdotto la cinematica mandibolare concentrandoci sul piano sagittale. Durante i movimenti di protrusione e retrusione, la mandibola non si muove esclusivamente lungo l'asse , ma ruota attorno al centro dell'asse . Questo movimento condilare si manifesta anteriormente, dove l'incisivo mandibolare segue traiettorie curvilinee inverse, risultato di un complesso moto spaziale generato dalla rototraslazione sugli assi condilari. Lo spazio angolare risultante, noto come 'Spazio libero Interincisivo', è essenziale per consentire movimenti masticatori fluidi e senza ostacoli.


Questo 'Spazio libero Interincisivo' riveste un ruolo cruciale nelle funzioni masticatorie. Tuttavia, strumenti come il Sirognatograph e i sistemi elettromagnetici tradizionali trascurano la componente rotazionale dei movimenti condilari, focalizzandosi principalmente sulle traslazioni. Sebbene ciò possa essere sufficiente per alcune registrazioni, tale approccio è limitato nel cogliere la complessità dei movimenti mandibolari a sei gradi di libertà.
Cinematica Mandibolare a Sei Gradi di Libertà
Il movimento mandibolare avviene in uno spazio tridimensionale e può essere descritto come un complesso moto spaziale. Ogni condilo è associato a tre assi principali:
- Asse (latero-mediale): Definisce la rotazione attorno all'asse cerniera trasversale (, transverse Hinge Axis).
- **Asse (verticale):** Definisce la rotazione sull'asse cerniera verticale ().
- **Asse (antero-posteriore): Definisce la rotazione attorno all'asse cerniera orizzontale ().




A ciascun asse corrisponde un piano di riferimento anatomico:
- Piano sagittale: Mostra il tracciato condilare prodotto dal movimento di rototraslazione dell'asse trasversale ().
- Piano coronale: Associato all'asse orizzontale ().
- Piano assiale: Legato al movimento generato attorno all'asse verticale (, noto anche come asse cerniera verticale).
Va evidenziato che un piano non è generato da un asse; un asse può al massimo essere contenuto in un piano o rappresentare una direzione. Più precisamente, il movimento di un asse genera una 'superficie rigata', che descrive le traiettorie spaziali risultanti.
Asse cerniera verticale
Ci concentreremo sull’asse cerniera verticale () per la sua rilevanza nei sistemi di registrazione cinematici come pantografi, elegnatografi e assiografi. Tuttavia, è necessario esaminare il razionale della Gnatologia Classica per comprendere l'interazione tra piani e assi nel descrivere i movimenti condilari.
- Il pantografo analogico è stato considerato un dispositivo capace di riprodurre con precisione i movimenti di confine dei tracciati condilari e di trasferirli su un articolatore completamente regolabile tramite le sue 6 piastrine.[1][2][3]
- Successivamente, si è riportato che anche il pantografo elettronico registrava i determinanti condilari con un intervallo accettabile (argomento trattato nei capitoli successivi).[4]
- Un determinante particolare del movimento condilare, la traslazione laterale immediata mandibolare (Movimento di Bennett), è stato oggetto di dibattito e confusione nella letteratura protesica.[5] Tuttavia, una recente revisione della letteratura ha evidenziato una mancanza di prove sul significato clinico di questo movimento.[6]
Nota sulla Precisione e Sugli Obiettivi dello Studio
Questo studio mira a fornire una comprensione concettuale dei principi cinematici coinvolti nella dinamica masticatoria, con un focus sulla biomeccanica mandibolare. Sebbene i calcoli siano stati eseguiti con rigore, potrebbero verificarsi discrepanze dovute a:
- Approssimazioni nei dati numerici: Differenze nei valori cartesiani legate a variabili operative.
- Limiti di rappresentazione: Uso di numeri approssimati per motivi pratici.
- Finalità cliniche: Lo scopo è descrivere concetti piuttosto che ottenere precisione assoluta.







Passi Successivi
In questo capitolo, analizzeremo la cinematica dell'asse verticale () e il fenomeno masticatorio, rappresentandolo con tracciati estratti da lavori di riferimento come quello di Lund e Gibbs.[7](Figura 1)
Descrizione della Calibrazione: da Pixel a Millimetri
La calibrazione di un'immagine per ottenere misurazioni accurate richiede l'attenzione a diversi fattori critici. Estrarre distanze da un'immagine può essere complesso, poiché la precisione dipende da:
- Fattori di distorsione: Le immagini possono essere affette da distorsioni ottiche, che devono essere corrette calibrando la camera utilizzando, ad esempio, una scacchiera di riferimento.
- Effetto prospettico: La scala di riferimento varia con la distanza dal piano di acquisizione. Per oggetti posti a diverse profondità, è necessario applicare fattori di scala specifici, calcolati utilizzando un modello come quello della pin-hole camera.
- Distorsioni prospettiche: Queste possono essere corrette utilizzando ottiche telecentriche, particolarmente utili per applicazioni che richiedono un'elevata accuratezza, come nelle misurazioni spaziali o bioingegneristiche.
Con questa premessa, il fattore di scala utilizzato nel nostro studio rappresenta un'approssimazione valida nel contesto specifico delle immagini 2D acquisite in condizioni controllate. Tuttavia, per applicazioni più rigorose, come quelle descritte sopra, è necessario considerare strumenti e metodi avanzati per la calibrazione.
Calcolo della Distanza tra i Punti
Le coordinate dei punti sono:
e


La formula per la distanza euclidea è:

Sostituendo i valori:



Conversione della Scala in mm
Dato che il segmento di equivale a , calcoliamo la conversione in mm/pixel:



Quindi, ogni pixel nella figura corrisponde a circa:
.

Esempio di Applicazione: Conversione Distanza in mm
Supponiamo di voler calcolare una distanza in mm. Ad esempio, se la distanza in pixel fosse :


Risultato Finale
La scala è:

Questi valori possono essere usati per convertire qualsiasi distanza misurata in pixel nella figura in unità metriche come millimetri o centimetri.
Cinematica dei Condili
Traslazioni e Rotazioni dei Condili
Nel contesto del movimento mandibolare, i condili eseguono sia movimenti traslatori (spostamenti lineari) sia rotatori (movimenti angolari attorno a specifici assi). Questo doppio movimento, noto come rototraslazione, è fondamentale per comprendere la cinematica mandibolare.
Per descrivere la posizione e il movimento di ciascun condilo nel tempo, si utilizzano vettori di posizione, che variano in modulo e direzione a seguito del moto elicoidale. Il moto è descritto da una combinazione di spostamenti lineari e variazioni angolari che influenzano la posizione dei vettori nello spazio tridimensionale.
Vettori di Posizione del Condilo Laterotrusivo (Lavorante)
Il condilo laterotrusivo si trova sul lato in cui avviene la laterotrusione (spostamento laterale della mandibola). Durante il movimento, la sua posizione è descritta dal seguente vettore:
![{\displaystyle P_{l}(t)=[X_{l}(t),Y_{l}(t),Z_{l}(t),\theta _{l}(t),\phi _{l}(t),\psi _{l}(t)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0460bad60fdbd2bf924fac810d7383a682d79d9e)
Dove:
- : Spostamenti lineari lungo gli assi cartesiani:
- : Spostamento antero-posteriore.
- : Spostamento latero-mediale.
- : Spostamento verticale.




- , , : Rotazioni angolari attorno agli assi , e , descritte con gli angoli di Eulero.



Adottiamo la convenzione , che segue l’ordine:

- : Rotazione attorno a (torsione laterale).
- : Rotazione attorno a (apertura/chiusura).
- : Rotazione attorno a (rotazione laterale/mediale).
Questa sequenza consente una descrizione univoca dell’orientamento del condilo nello spazio.

Figura 2: Tracciati cinematici masticatori sul piano sagittale.
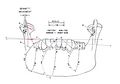
Figura 3: Tracciati cinematici masticatori sul piano coronale.

Figura 4: Tracciati cinematici masticatori sul piano assiale.



Traslazione del Condilo Mediotrusivo
Il condilo mediotrusivo, sul lato opposto al movimento laterale, si muove principalmente con una traslazione anteriore e mediale nello spazio tridimensionale. La traslazione è descritta dal seguente vettore:

Dove:
- : Coordinate temporali del condilo mediotrusivo nello spazio cartesiano.

Questo tipo di traslazione influenza significativamente i tracciati occlusali, generando variazioni di orientamento durante il ciclo masticatorio.
Descrizione delle misure lineari ed angolari
Rappresentazione scalare dei tracciati condilari
Descrizione delle distanze e delle direzioni
Di seguito sono riportate le distanze calcolate tra i punti rispetto al punto di partenza (punto 1, massima intercuspidazione), considerato punto di riferimento, e le relative direzioni nello spazio, utilizzando le coordinate corrette per gli assi (antero-posteriore) e (latero-mediale).
Calcolo delle distanze tra i punti
Le coordinate dei punti estrapolate da Geogebra dopo calibrazione, per il condilo laterotrusivo, sono:
- 1L:
- 2L:
- 3L:
- 4L:
- 5L:
- 6L:
- 7L:
- 8L:








Fattore di scala:
Distanze rispetto a :
:



:



:



:



:



:



:


Condilo Laterotrusivo
Questo paragrafo descrive il calcolo delle distanze e degli angoli tra segmenti in un piano 2D, applicati alla cinematica mandibolare. In particolare, si analizzano i movimenti articolari dei condili durante il ciclo masticatorio, rappresentati nella Figura 5 e nella Tabella 1.
| Tabella 1 | ||||
|---|---|---|---|---|
| Tracciato masticatorio | Markers | Distanza (mm) | Direzione | Direzione |
 |
2 | 1.734 | Protrusiva | Parallela |
| 3 | 4.99 | Protrusiva | Lateralizzazione | |
| 4 | 6.59 | Protrusiva | Lateralizzazione | |
| 5 | 3.66 | Inversione | Inversione | |
| 6 | 0.923 | Retrusiva | Lateralizzazione | |
| 7* | 0.898 | Protrusiva | Medializzazione | |
| 8 | 0.257 | Protrusiva | Medializzazione | |
Dalla figura e dalla tabella emerge che il punto rappresenta l'inversione del moto condilare, con il passaggio verso un percorso mediale diretto alla massima intercuspidazione. La distanza tra il punto e , pari a circa , definisce il movimento di Bennett.

La direzione angolare è stata calcolata come: e .


Per approfondire, il calcolo dettagliato è riportato di seguito:
![]() Calcolo dettagliato: distanza tra e , distanza euclidea , convertita in mm come , angolo .
Calcolo dettagliato: distanza tra e , distanza euclidea , convertita in mm come , angolo .





- ↑ Curtis, D.A. ∙ Sorensen, J.A. Errors incurred in programming a fully adjustable articulator with a pantograph J Prosthet Dent. 1986; 55:427-429
- ↑ Clayton, J.A. ∙ Kotowicz, W.E. ∙ Zahler, J.M. Pantographic tracings of mandibular movements and occlusion J Prosthet Dent. 1971; 75:389-395
- ↑ Shields, J.M. ∙ Clayton, J.A. ∙ Sindledecker, L.D. Using pantographic tracings to detect TMJ and muscle dysfunctions J Prosthet Dent. 1978; 39:80-87
- ↑ Payne, J. Condylar determinants in a patient population: electronic pantograph assessment J Oral Rehabil. 1997; 24:157-163
- ↑ Bennett, N.G. A contribution to the study of the movements of the mandible Proc R Soc Med. 1908; 1:79-98
- ↑ Taylor, T.D. ∙ Bidra, A.S. ∙ Nazarova, E. ... Clinical significance of immediate mandibular lateral translation: A systematic review J Prosthet Dent. 2016; 115:412-418
- ↑ N A Wickwire, C H Gibbs, A P Jacobson, H C Lundeen. Chewing patterns in normal children. Angle Orthod. 1981 Jan;51(1):48-60.